背景
本节是对CSAPP Chapter6内容的整理,同样参考b站课程与书本。 存储器层次结构是一个具有不同容量、成本和访问时间的存储设备的层次结构
存储技术相关介绍
随机访问存储器(RAM)
包含两种类别:
- SRAM(Static RAM):速度快,主要用于CPU芯片中的高速缓存
- DRAM(Dynamic RAM): 主要用于内存单元
- 两者都是掉电丢失数据
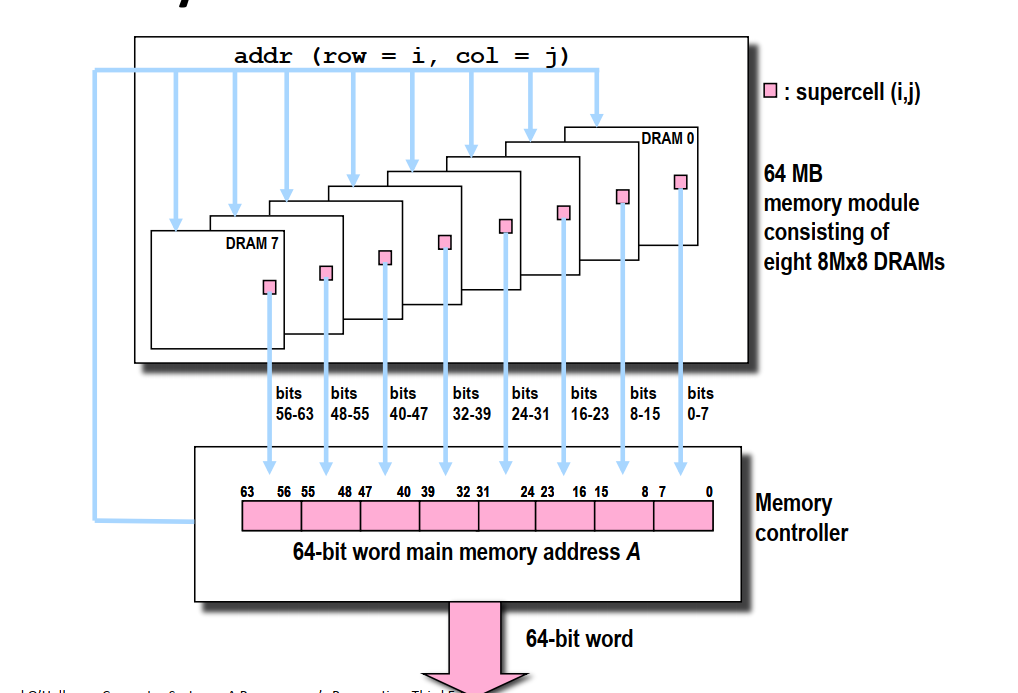
DRAM
DRAM按照\(d\times w\)的形式组织,d为超单元个数,有一个二维坐标,w为每个超单元的位数。
磁盘存储
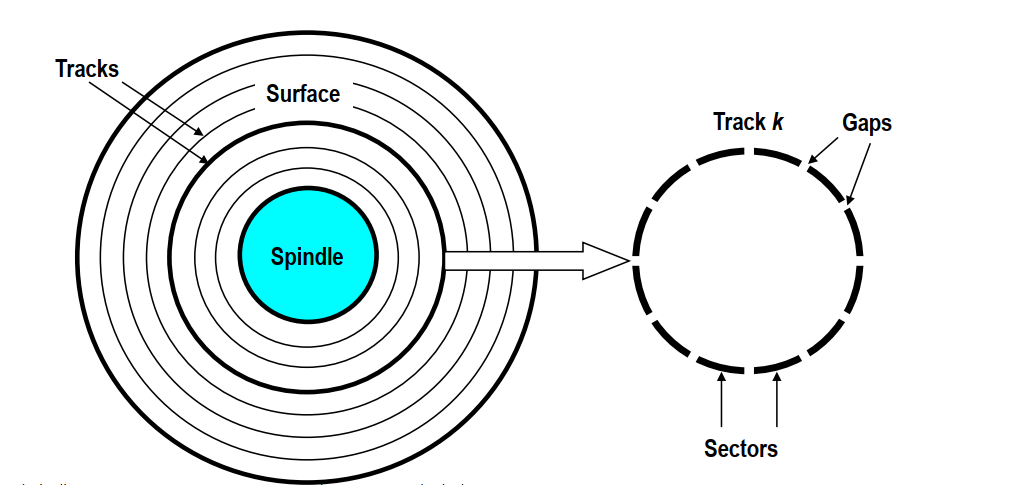
基本概念
- 盘片(platter):每个磁盘由若干盘片组成
- 表面(surface):每个盘片有两个表面
- 磁道(track):表面上的若干个同心圆
- 扇区(sectors):每个磁道划分为一组扇区,扇区包含相等的数据,扇区间由间隙(gap)
磁盘容量
主要由以下几个指标决定:
- 记录密度(bits/in): 磁道1英寸的段中可以存储的位数
- 磁道密度(tracks/in):盘片中心一英寸的段内的磁道数目
- 面密度(bits/in2): 上述的平方
存在的问题:如果每个磁道的扇区数目相同,则外围的磁道扇区之间的间隙会越来越大,造成空间的浪费。 改进:对磁道划分记录区,记录区之间的磁道有相同的扇区。。外围的记录区磁道数目更多。 磁盘容量的计算公式为
\[ bytes/sector \times avg.sectors / tracks \\ \times tracks / surface \times surface / platter \times plattter / disk \]
寻找数据
磁盘访问某块数据的过程如下图所示: 
可以看到,访问某块数据的时间由三块组成
- 寻道时间:磁头移到对应磁道的时间(9ms)
- 旋转时间:旋转到目标扇区的时间(4ms)
- 传送时间:读写扇区内容的时间(0.02ms)
其他
- 磁盘中的磁盘控制器维护着逻辑块号和实际扇区之间的映射表。每个逻辑块可能由B个扇区组成。
- 为什么磁盘的实际容量总是比标着的小:
- 厂商使用的是\(1GB = 10^9 Byter\)的计量。
- 留出备用的扇区填补损坏的扇区。
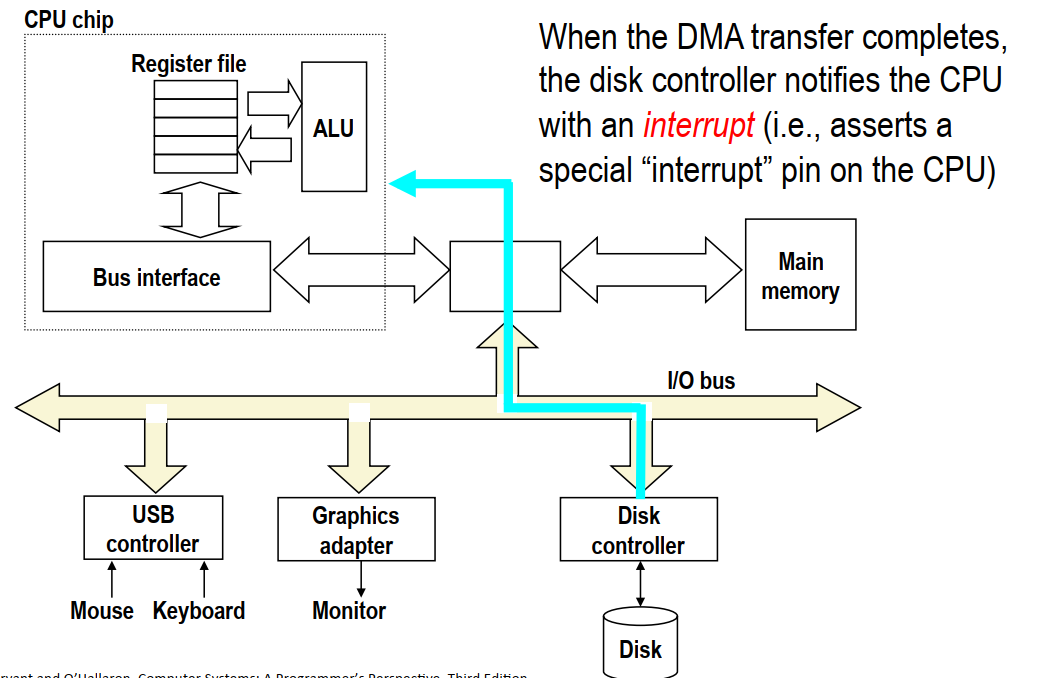
- CPU访问磁盘的过程:
- CPU发送请求
- 磁盘收到命令后直接将内容传送到内存,不需要经过CPU(避免CPU资源的浪费)——直接内存访问
- 磁盘控制器在数据传送完成后发送中断信号通知CPU。
固态硬盘
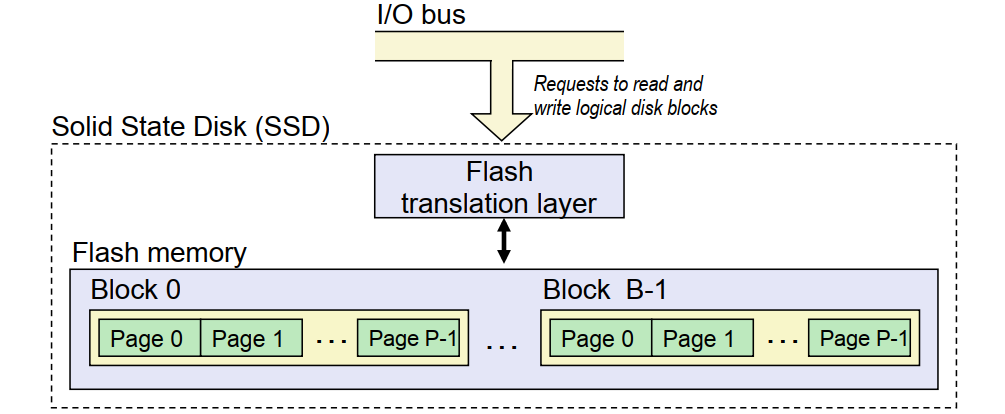
- 由B个块的序列组成,每个块包含P页。
- 以页为单位写数据(512B-4KB),每次写入都需要将对应的块擦除
- 固态硬盘有写入次数限制
- 随机读写要比顺序读写速度慢
局部性
局部性是指程序应该倾向于引用:1)邻近于最近引用过的数据项的数据。2)最近引用过的数据项本身。包括数据引用和指令本身的局部性。
一个简单的例子
下面的两版代码,第一版的效率要高于第二版。这是因为在C语言中,数组是按照行优先的顺序存储的,代码1每次访问元素的间隔为1,而代码2每次访问元素的间隔为N。 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20// 按行读取
int sumarrayrows(int a[M][N]){
int i, j, sum=0;
for(i = 0; i < M; i++){
for(j = 0; j < N; j++){
sum += a[i][j];
}
}
return sum
}
// 按列读取
int sumarraycols(int a[M][N]){
int i, j, sum=0;
for(j = 0; j < N; j++){
for(i = 0; i < M; i++){
sum += a[i][j];
}
}
return sum
}
存储器层次结构
存储器的层次结构如下图所示 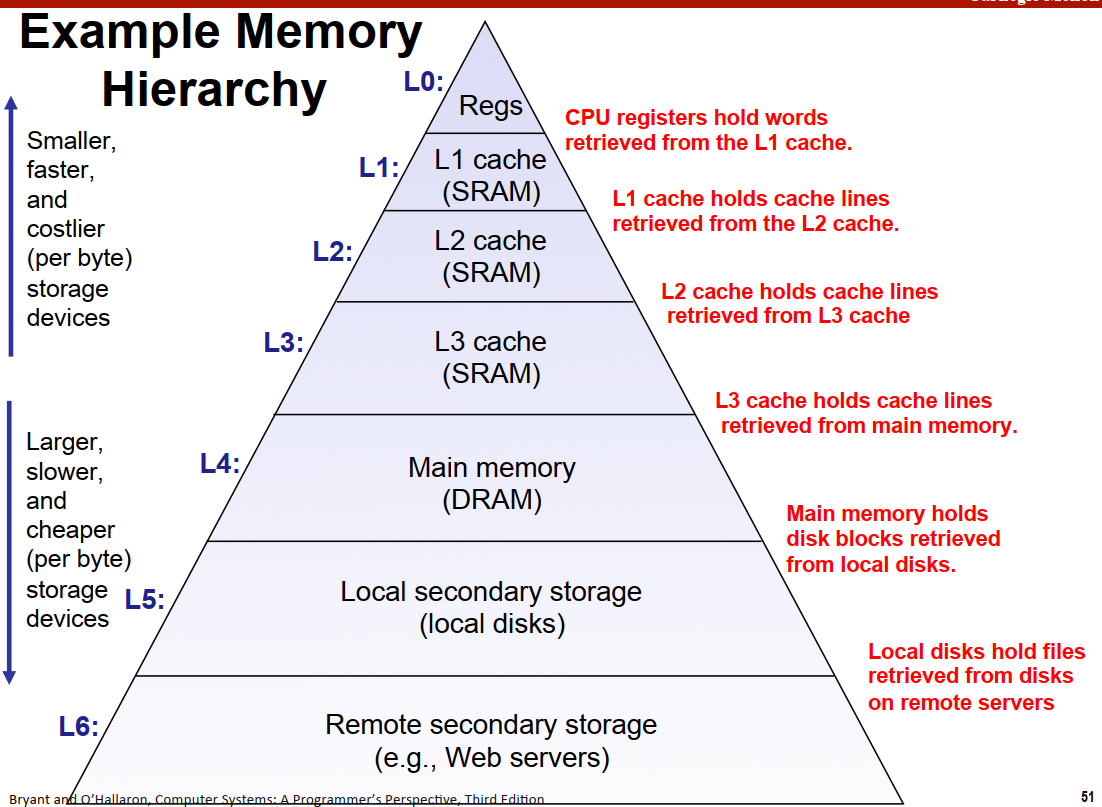 存储器层次结构本质是高层的存储器能够缓存(cache)低层存储器的部分数据,这也是为什么需要注重程序的局部性的原因。不同的层之间以块为大小做传输单元。
存储器层次结构本质是高层的存储器能够缓存(cache)低层存储器的部分数据,这也是为什么需要注重程序的局部性的原因。不同的层之间以块为大小做传输单元。
- 缓存命中(cache hit) 需要的数据对象d刚好缓存在第k层,则称为缓存命中
- 缓存不命中(cache miss)
- 需要从第k+1层取出对应数据块。
- 缓存已满则区域进行替换,有相应的替换算法。
- 缓存不命中的种类
- 冷不命中:空缓存时造成的不命中
- 冲突不命中:由于放置策略的限制造成的不命中
- 容量不命中:工作集的大小超过了缓存的大小。
高速缓存存储器
这部分的内容主要是针对处理器中的L1/L2/L3缓存。在分析时为了简化,假设寄存器和内存之间只有一层L1缓存。
存储器内部组织结构
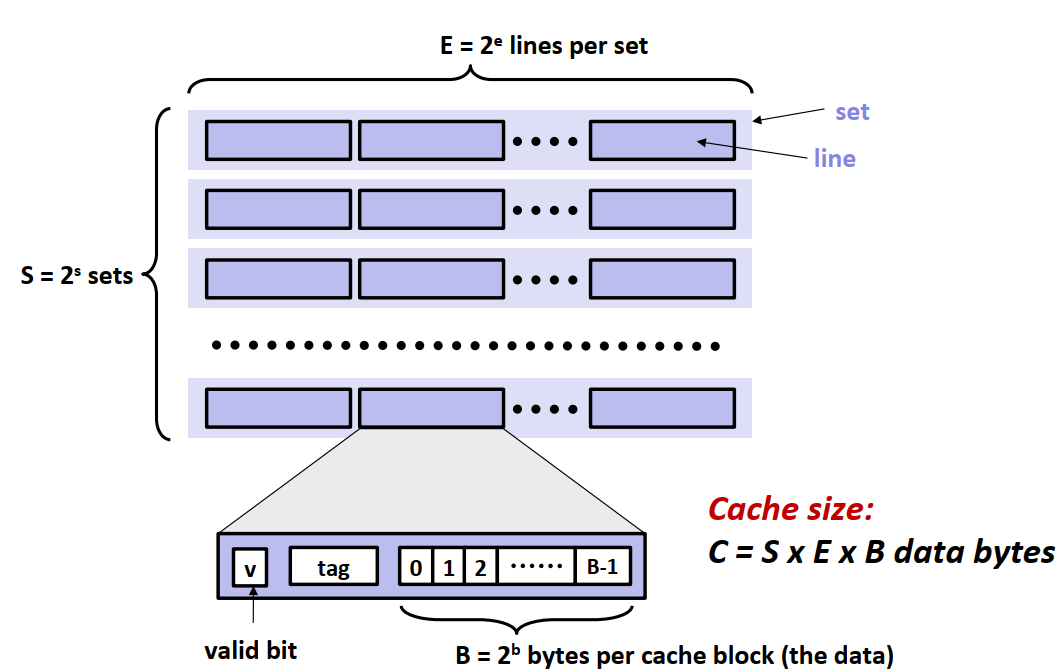
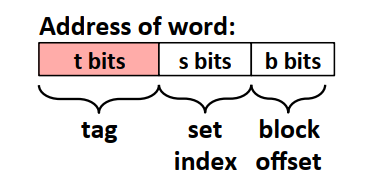
如上图,缓存中有S组高速缓存组,每组中有E个缓存行,每个缓存行包含了:1)数据是否有效的有效位。2)标记位标记当前的缓存块信息。3)B字节大小的缓存数据块。 假设内存的地址有m位,则缓存行中标识位的位数为\(t=m - s - b\),内存地址的标识则如下图。缓存的数据总大小为\(C = S \times E \times B\)。
缓存映射方式
- 整体流程
- 根据中间s位的组索引确定缓存所在的组
- 对该组中每一行内存地址的标志位及有效位进行查找,找到符合要求的或确定缓存不命中。
- 读取数据或者进行行替换
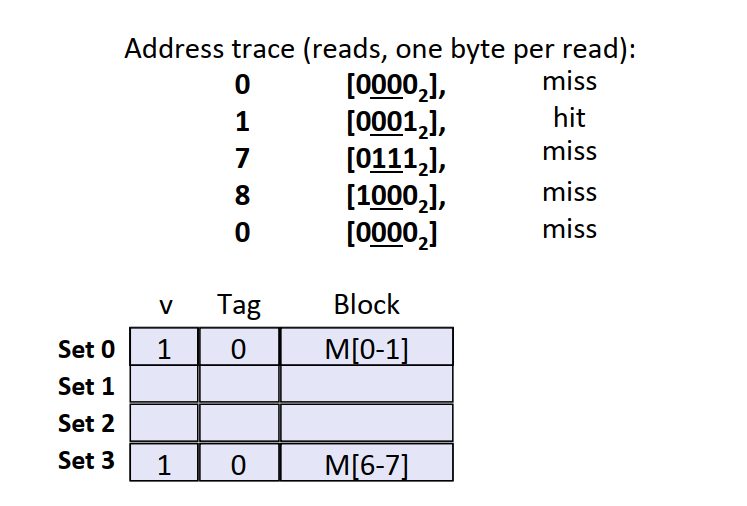
- 直接映射高速缓存(E = 1):由于组索引的冲突容易不断的加载和驱逐相同的缓存块西,造成冲突不命中。 下图的例子中,\(m=4, t=1, s=2, b=1\)
- 组相联高速缓存(E > 1): 根据组索引确定组后,需要根据有效位和和标记位确定数据块。

- 全相联高速缓存:一个组包含所有高速缓存行,只适用于小的高速缓存
其他tips
- 组索引为什么用中间位而不是高位: 用高位做索引,连续的内存块总是映射到相同的高速缓存块。
- 缓存不命中时行替换的政策: 可以用随机替换政策/LRU(最近最少使用)/LFU(最不常使用)
- 关于写的问题: 写命中(写一个已经缓存的字):1) 直接写到低一层中。2) 等到该块被驱逐时再写入(需要维护一个标志位表示该块是否被更新过) 写不命中:1) 直接写到低一层中。2) 加载相应的块到缓存中,再根据需要更新。
- 关于缓存性能的评价指标:
- 不命中率 = 不命中数量 / 引用数量
- 命中时间: 从缓存传送一个字到CPU所需的时间
- 不命中处罚:命中时间外所需要的额外时间
- 99%的hit rate 比97%的hit rate好很多,因为不命中处罚往往比命中时间大很多
编写缓存友好的代码
主要原则: * 对局部变量反复引用:局部变量能够被寄存在寄存器中 * 步长为1的引用模式:如行优先遍历数组
考虑下面的矩阵乘法例子,其时间复杂度为\(O(n^3)\),共有\(i,j,k\)三层循环。不同的循环顺序例子如下:
1 | // i j k |
三种方式的示意图如下。注意后面两种循环顺序相比于第一种多了一步内存访问,这其实是一种内存引用次数和不命中率的trade-off。 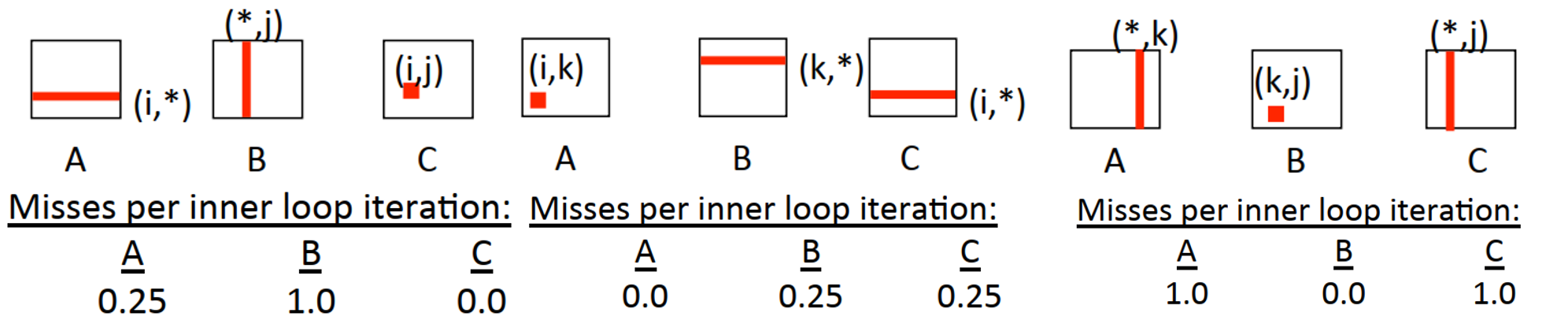
进一步可以从时间局部性考虑进行改进,使得相同的块在未来尽可能多的被使用。 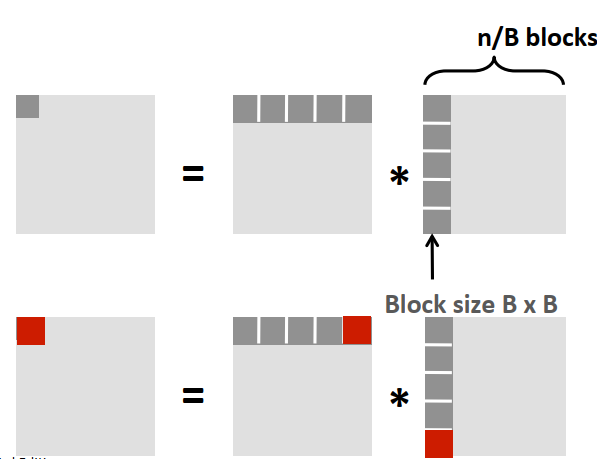
不命中率的计算为(假设n/B为整数, B/8为整数) \[ \begin{gathered} \text{每个block的不命中次数为}: B/8\times B \\ 计算C的一个block总不命中次数为:2\times n/B \times B^2/8 = nB / 4 \\ 计算所有block的总不命中次数为: nB / 4 \times n^2 /B^2 = n^3 / 4B \end{gathered} \]